Oxford Road
University of Manchester
M13 9PL, UK
Zhegong Shangguan
I am Zhegong Shangguan (上官哲公), a Postdoctoral Research Associate at the Cognitive Robotics Lab, University of Manchester, where I work on the ERC-funded e-TALK project under Prof. Angelo Cangelosi. I received my PhD from ENSTA Paris, Institut Polytechnique de Paris, supervised by Prof. Adriana Tapus. My research centers on Cognitive Robotics and Human-Robot Interaction, with a focus on embodied AI, social and affective interaction, and multimodal haptic interfaces for autonomous systems.
My long-term goal is to advance Embodied AI that enables robots to operate robustly in real-world domestic environments and to use robotic platforms as computational simulators for studying human embodied cognition. I also serve as a reviewer for leading journals, including The International Journal of Robotics Research (IJRR), ACM Transactions on Human-Robot Interaction (ACM THRI), International Journal of Human-Computer Interaction (IJHCI), and Transportation Research Part F.
news
| Jun 2026 | Five papers accepted (2026/06): three at IEEE/RSJ IROS 2026, one at IEEE RO-MAN 2026, and one at TAROS 2026. |
| Mar 2026 | Paper accepted at HRI Companion '26 — Fluid-Xpress: Emotion-Aware Dual-Loop Framework for Empathic Facial Reaction in HRI. doi → |
| Sep 2025 | Best Paper Finalist at IEEE/RSJ IROS 2025, Abu Dhabi. read → |
| Sep 2025 | Invited talk at IROS AV & UX Workshop — "Beyond Signals: Touch, Emotion, and Arousal in Human Driving Behavior". |
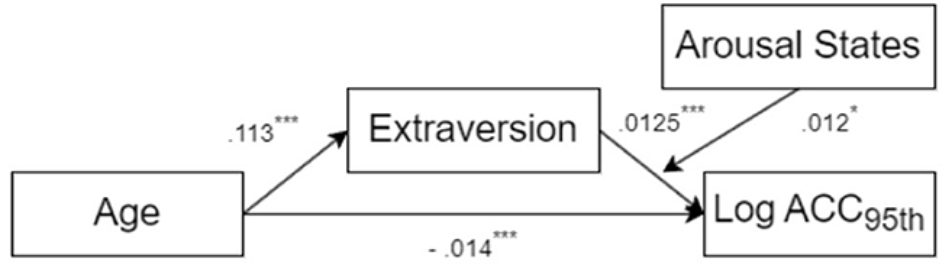
| Mar 2025 | Paper published in Frontiers in Psychology. doi → |
| Jan 2024 | Joined University of Manchester as Postdoctoral Research Associate on the ERC e-TALK project. |
publications





contact
Cognitive Robotics Lab · University of Manchester
Oxford Road · Manchester M13 9PL · UK