|
The SeaBat 8160 is a 50 kHz sonar with transmission and reception arrays
arranged in a 'T' shape. The array is kept rigidly attached to the vessel
by a portable mount (such as below) or rigidly attached to the ship's hull.
A sound velocity probe, such as the AML probe shown below, is installed with the array to assist the system
in calculating beam pointing angles. Onboard, the equipment comprises
rack-mounted transceiver unit (transmit power circuits and receive signal amplification), Sonar
Processor (beamforming and various calculations using data from the motion sensor) and SeaBat
6042 PC system (providing overall system control and data logging).
The system is designed to illuminate a swath of the sea floor that is 150 degrees
across track and 1.5 degrees along track. Within the swath, water
depth is measured using 126 beams, spaced 1.2 degrees apart, with an acoustic
range from around 10-20 m up to 3000 m, depending on local water salinity, temperature
and ambient noise conditions. In practice this means that the system can achieve a swath of
7.4 times the local water depth in shallow water and somewhat less in deeper water
(around 3 km wide in 1-2 km depth, reducing to a narrower swath towards 3 km depth).
In addition to soundings, the system calculates an acoustic image of the
seabed, which is similar to a sidescan sonar image. This provides
complementary information to the soundings and can help to discriminate
seabed types from their acoustic backscatter (e.g. different rock or sediment
types).
|

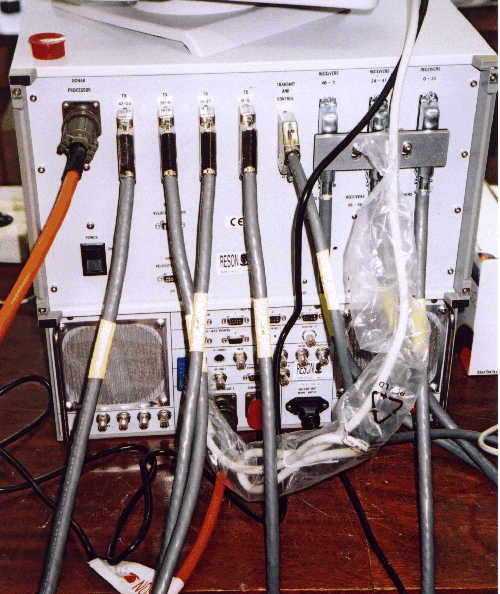
SeaBat 8160 acoustic array in its frame. The transmitter lies along the long axis of the T and receiver along the shorter cross axis. The system is installed at the end of a pole attached at the wide flange just visible below the right side of the array (the array lies upside down while surveying with the transmitter pointing aft). SeaBat 8160 transceiver (top) and 81-P sonar processor (bottom). Click here for a view of the back. |
|
The SeaBat 8101 is a 240 kHz sonar with a linear transmission array but with
a circular reception array. The circular array makes the beam orientations less
sensitive to variations in sound velocity than the linear array, so it is thus
more suitable for coastal work where there may be rapid changes in sound velocity
around estuaries from brackish to salt water. The system also
comprises a rack-mounted Sonar Processor and shares the SeaBat 6042 PC system
with the SeaBat 8160.
As with the 8160, the system is designed to provide depth information in 101 beams, each of
1.5 degrees, across a 150-degree sector, and to calculate an acoustic
backscatter image.
The system works from a minimum of 0.5 m below the transducers to a maximum range of 300 m.
With the higher frequency and shorter pulse length, the system
produces higher resolution data than the SeaBat 8160, but
at the expense of a less extensive depth range.
|

SeaBat 8101 acoustic array (lying in one half of its case). The transmitter is the long stick at front (vertical) and the recieve hydrophone array lies beneath the black circular band. When deployed, the system has plastic farings attached on to the two flat faces of the head and mounting brackets also fixed to the faces attach the system to its pole. |
| This is a GPS-aided inertial navigation system designed to calculate the position and orientation of the vessel in 6 degrees of freedom. The system comprises an inertial motion unit (solid state gyros and accelerometers), two GPS antennae and a computational unit. Data from the IMU and GPS antennae (along with DGPS corrections) are combined to provide accurate position and orientation in a way that exploits the characteristics of the two measurement types. The heading, roll and pitch accuracy is predicted to be 0.02 degrees, and heave accuracy 5 cm or 5% of range. Vessel orientation data are fed to the SeaBats in realtime to be logged along with the sonar data for later calculation of sounding positions and depths. Pitch information is also used in realtime by the SeaBats to ensure that their transmission beams are kept vertical (pitch stabilisation). Further information on the IMU can be found on the Applanix website. |
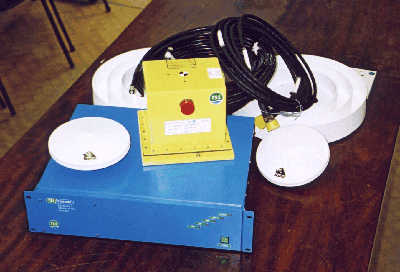 Yellow box - inertial motion unit
Yellow box - inertial motion unitblue box - computational unit white discs - NovAtel GPS antennae |
| This is a simple system designed to receive differential corrections transmitted by UK lighthouse stations and equivalent IALA stations abroad. Position precision with this system has been quoted as around 1 m within 60 miles of the stations. An upgrade is intended in the future to take advantage of the dual frequency antenna of our TSS POS/MV system, which would provide greater precision. Further details of the MBX-3 can be found on the CSI website. |
| The SVP25 is a self-recording sound velocity probe capable of measuring sound velocity from the surface down to 2000 m. Sound velocity data are stored in the probe and then downloaded to a PC onboard (to the SeaBat 6042 computer in our case). Further details can be found on the Navitronic website. |
| This system comprises a pressure transducer linked to a battery-powered recorder, from which the data can be downloaded to a PC. Water levels can be recorded to an accuracy of 0.1% for a period of anything up to 2 years. The data are combined with the SeaBat data during processing to correct soundings for tidal variations. Further details of the Model 740 Portable Water Level Recorder can be found on the Valeport website. |

Black box - logging unit Cable end - pressure transducer |
| We currently have a 400 kg steel tubular arm that sits over the side of the vessel to rigidly hold the SB8160 sonar to the vessel (an adaptor also allows the SB8101 to de deployed from the assembly). Vibrations of the sonar transducer array are a common cause of data corruption with portable multibeam sonars so this assembly was conceived by engineers from Reson as a solution. Alternative mounting assemblies may need to be designed and fabricated for other vessels considered for installation. |
|
CARIS HIPS and SIPS (hydrographic and sidescan processing software) provided under their academic partner programme. Reson SeaBat 6042 offline processing system. MB-System freeware. Details of MB-System can be found on the MBARI website. Other software available for general processing includes ArcView, GMT (free software available from SOEST (Hawaii)) and various software generated in-house. In Manchester, the DEM data can potentially be viewed on the Department's 3D seismic visualisation lab. |
One screen of the 6042 on-line and post-processing system. |


{kind=link}